
水空两栖飞行器

水陆两栖飞行器介绍
随着电子技术、自动控制技术、人工智能技术的发展,无人智能装备得到了快速发展,如无人船、无人机等。其中,飞行器因其速度快、机动性好等优点而得到了广泛应用,但是也存在续航力较短、隐蔽性较差等缺陷,而这些缺陷恰好可以由航行器弥补,水空两栖飞行器的概念因此被提出。水空两栖飞行器是航空科学家和工程师结合飞行器和无人船发明的一种可以实现水空两栖作业的飞行器,其兼具了无人船和无人机的优势,具有场景适应能力强、滞留时间长等特点,既可以飞行在空间狭窄的空间,又可以在复杂水域中灵活穿梭,突破了无人机和无人船的限制。在民用领域,两栖飞行器可以广泛应用于各种场景,如水上救援、森林消防、水体环境检测、海洋生态环境监测等。在军事方面可以用于隐蔽突袭、侦查、通讯等任务,服务于国防事业。
实验室致力于水陆两栖飞行器的研究与开发,包括以下方向:
- 结构设计:设计高效稳定的水陆两栖飞行器结构,考虑轻量化和强度优化。
- 控制设计:开发智能化的控制系统,实现水陆两栖飞行器的平稳飞行和操作。
了解更多,请观看我们的水陆两栖飞行器展示视频:
观看水陆两栖飞行器展示视频动态捕捉系统
动态捕捉系统介绍
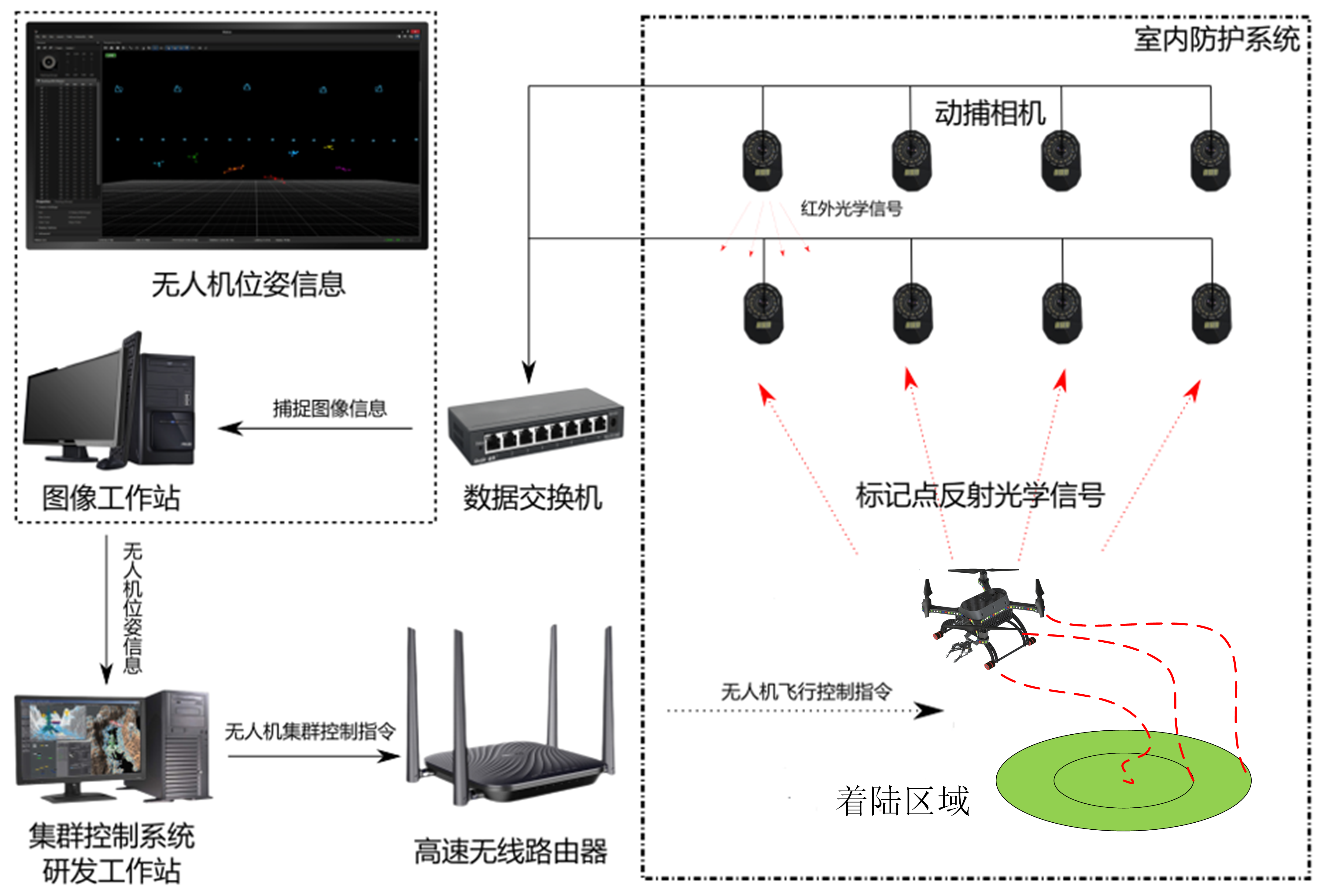
动态捕捉系统是一种结合了无人机、动捕相机、室内防护系统、数据交换机、图像工作站、集群控制系统研发工作站和高速无线路由器等多种技术的先进系统,旨在实现对无人机运动的实时捕捉、定位和控制。
动态捕捉系统各组成部分介绍:
- 动捕相机:动捕相机捕捉由着陆区域标记点反射的光学信号,并将该信号传输给数据交换机;
- 数据交换机:数据交换机负责接收来自多个动捕相机的数据流,并将这些数据集成和转发到图像工作站;
- 图像工作站:图像工作站利用接收到的图像信息,运用图像处理算法计算无人机的位姿信息,并将位姿信息传送到集群控制系统研发工作站;
- 集群控制系统研发工作站:集群控制系统研发工作站根据接收到的位姿信息,生成无人机集群的控制指令。
- 高速无线路由器:高速无线路由器将生成的控制指令发送至各个无人机,控制无人机的运动和行为。
- 室内防护系统:室内防护系统主要是为了确保无人机在室内环境中安全飞行并避免碰撞或意外事故发生。
研究方向:
- 传感器技术优化: 研究如何提高动捕相机的感应性能和精确度,以实现更准确的运动捕捉和位姿计算。
- 图像处理算法研究: 进一步优化图像处理算法,提高对复杂环境下无人机位姿的精确计算能力,增强系统的稳定性和鲁棒性。
- 集群控制系统优化: 设计和优化集群控制系统,实现对多个无人机协同作战或任务执行的高效管理和控制。
- 无线通信技术改进: 研究高速无线路由器的通信协议和技术,确保控制指令能够及时、可靠地传输给无人机。
- 无人机集群控制:包括多个无人机在室内环境中的协同路径规划与分配,无人机集群内部的协调与分工机制,包括任务分配、资源分配、协作通信等。
半实物仿真系统
半实物仿真系统介绍
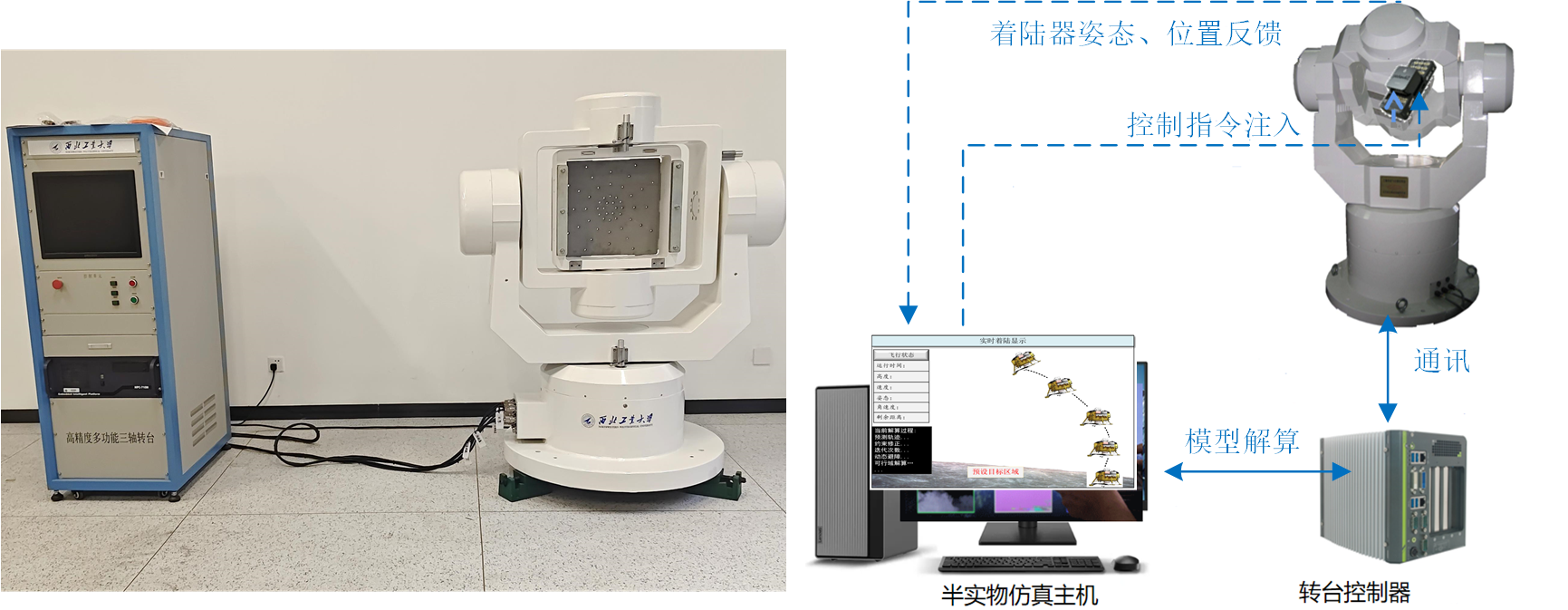
该系统是集教学与科研目的为一体的多功能实验台,在满足日常学生教学实验的同时,兼顾无人机飞行控制及飞行力学等学科专业的科学研究,可完成基于PIXHAWK飞控硬件、三轴转台的多类型无人机建模、控制及协同制导算法半实物仿真研究,实现仿真模型与无人机实物联动,有效验证仿真算法性能。同时,该平台暂定利用AirSim(基于Unreal引擎的仿真软件,可以用于无人机、汽车等机器人仿真,具备开源、可跨平台等特点,并且支持使用PX4、ArduPilot进行软件在环仿真)搭建的模拟器框架+基本场景+交互界面,完成各类无人机实时视景三维演示及操控。后续可根据用户需求,细化教学、训练、科研功能,实现培训、研发等目的。
半实物仿真系统主要组成模块:
- 数字模拟平台:仿真主机、显控系统、数字飞机、三维飞行视景系统等;
- 半实物仿真系统:三轴转台、地面站系统、摇杆/遥控器、飞控/导航/通信/光电系统、其他载荷模块遥控器等。
功能特点:
- 1.集教学与科研目的为一体的多功能实验台,可完成姿态控制、制导导航等专业的科学研究;
- 2.实现无人机飞控、载荷、三轴转台在环半实物仿真、三维视景显示;
- 3.支持飞行器状态数据,如传感器、舵机、控制模式、链路接口等状态的展示;
- 4.支持多旋翼、固定翼等小型无人机飞控系统设计验证;
- 5.可完成飞控仿真,虚实结合教学展示;
- 6.控制接口包括对象的:位置、速度、姿态;
- 7.支持不同的天气状态设置,包括:雨、雪、雾、风速、落叶、沙尘;
- 8.支持对象外观设置,可以将对象外形设置成若干型号;
- 9.支持传感器有:相机、气压计、IMU、GPS等。
垂直起降固定翼无人机
垂直起降固定翼无人机介绍
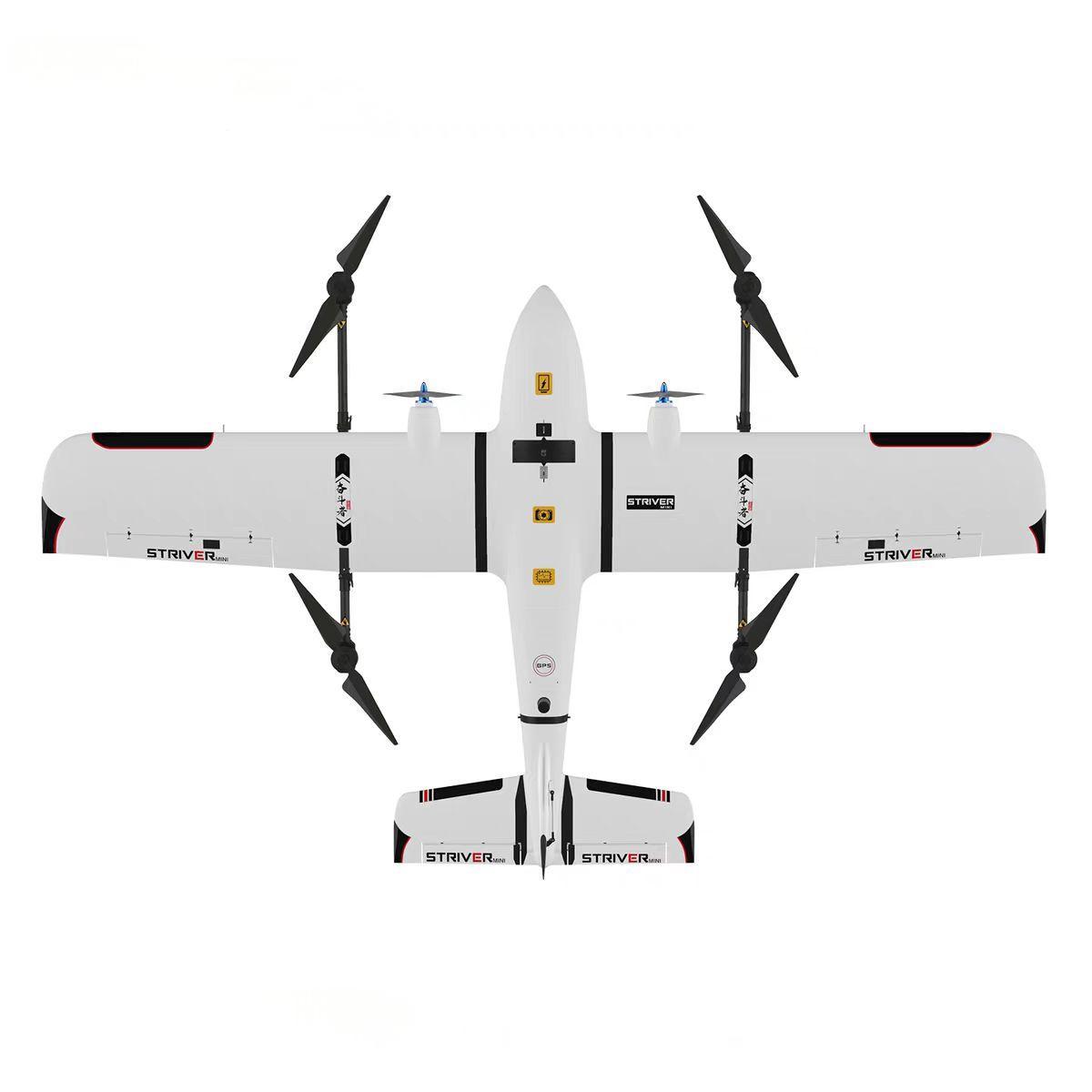
垂直起降固定翼无人机(eVTOL)是一种结合了多旋翼无人机垂直起降能力和固定翼无人机高效巡航能力的新型无人机。这种无人机能够在山区、丘陵、丛林等复杂地形和建筑物密集的区域顺利作业,极大扩展了无人机的应用范围。垂直起降模式下,无人机利用垂直升降发动机实现垂直起降,而在巡航模式下,切换到固定翼模式,利用机翼产生的升力进行高效巡航。这种独特的起降-巡航性能使其在军事侦察、地理测绘、物流运输等领域具有广泛的应用前景。
主要研究方向:
- 控制算法开发:鉴于垂直起降固定翼无人机复杂的飞行模式切换与多自由度控制需求,本实验室着力开发高精度、高鲁棒性的飞行控制算法。借助先进的传感器融合技术,实时精准获取飞行姿态、速度、位置等多维度信息,结合自适应控制理论与人工智能算法,实现无人机在复杂气象条件与干扰环境下,自动、平稳地完成垂直起降与固定翼飞行模式的无缝切换,精准跟踪预设航线,确保飞行安全与任务可靠性;
- 全局及局部路径规划:全局路径规划在已知环境信息下,为无人机从起点到目标点生成最优或可行路径。通过融合地理信息系统与实时环境感知数据,精准构建飞行区域的三维地图,综合考虑地形地貌、禁飞区、气象条件等因素,制定全局最优路径。局部路径规划则在飞行过程中,根据实时感知的环境信息对路径进行动态调整。在局部飞行过程中,垂起无人机能够快速识别并规避突发障碍物,如建筑物、树木、其他飞行器等,确保无人机在复杂多变的环境中,沿着安全、高效的路径飞行,提升任务执行效率与成功率。